
2024智慧树网课答案 智能机器人设计与实践 最新完整智慧树知到满分章节测试答案
第一章 单元测试
1、 问题:智能机器人通常要具有三个要素特征,分别是( )。
选项:
A:感觉要素
B:运动要素
C:思考要素
答案: 【
感觉要素
运动要素
思考要素
】
2、 问题:LEGO EV3机器人平台,最多可以安装( )个传感器
选项:
A:2
B:3
C:4
答案: 【
4
】
3、 问题:LEGO EV3机器人平台,最多可以安装( )个驱动电机
选项:
A:2
B:3
C:4
答案: 【
4
】
4、 问题:LEGO EV3机器人平台,标识为( )的接口可以安装传感器
选项:
A:“A”
B:“1”
C:“PC”
答案: 【
“1”
】
5、 问题:LEGO EV3机器人平台,标识为( )的接口可以连接电机
选项:
A:“B”
B:“3”
C:“PC”
答案: 【
“B”
】
第二章 单元测试
1、 问题:如果设计一个四轮全向机器人,需要使用下面哪种形式的车轮?( )
选项:
A:普通车轮;
B:麦克纳姆轮;
C:万向轮。
答案: 【
麦克纳姆轮;
】
2、 问题:功能分析系统技术(FAST图)中,从右向左描述的是系统的哪种运行逻辑?( )
选项:
A:How(怎么做);
B:When(先后逻辑);
C:What for(为何);
答案: 【
What for(为何);
】
3、 问题:如果在Python语言环境下,定义一个连接在1口的红外传感器IR,下面哪种方式是正确的?( )
选项:
A:IR=InfraredSensor(Port.1);
B:IR=InfraredSensor(Port.S1);
C:IR=InfraredSensor(Port.A);
答案: 【
IR=InfraredSensor(Port.S1);
】
4、 问题:如果在Python语言环境下,定义一个连接在2口的超声传感器US,下面哪种方式是正确的?( )
选项:
A:US=UltrasonicSensor(Port.2);
B:US=UltrasonicSensor(Port.S2);
C:US=InfraredSensor(Port.S2);
答案: 【
US=UltrasonicSensor(Port.S2);
】
5、 问题:如果在Python语言环境下,定义一个连接在3口的陀螺仪GS,下面哪种方式是正确的?( )
选项:
A:GS=GyroSensor(Port.S3);
B:GS=gyrosensor(Port.S3);
C:GS=GyroSensor(Port.3);
答案: 【
GS=GyroSensor(Port.S3);
】
第三章 单元测试
1、 问题:一个四轮全向机器人,其驱动麦克纳姆轮布局如图所示,如果机器人想实现向绕中心顺时针旋转,则四个驱动麦克纳姆轮运动方式为:( )
选项:
A: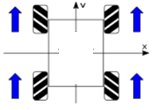
B: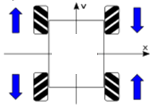
C: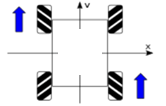
答案: 【
】
本文章不含期末不含主观题!!
本文章不含期末不含主观题!!
支付后可长期查看
有疑问请添加客服QQ 2356025045反馈
如遇卡顿看不了请换个浏览器即可打开
请看清楚了再购买哦,电子资源购买后不支持退款哦

